
VALKYR - [Work in Progress]
Date:
Overview
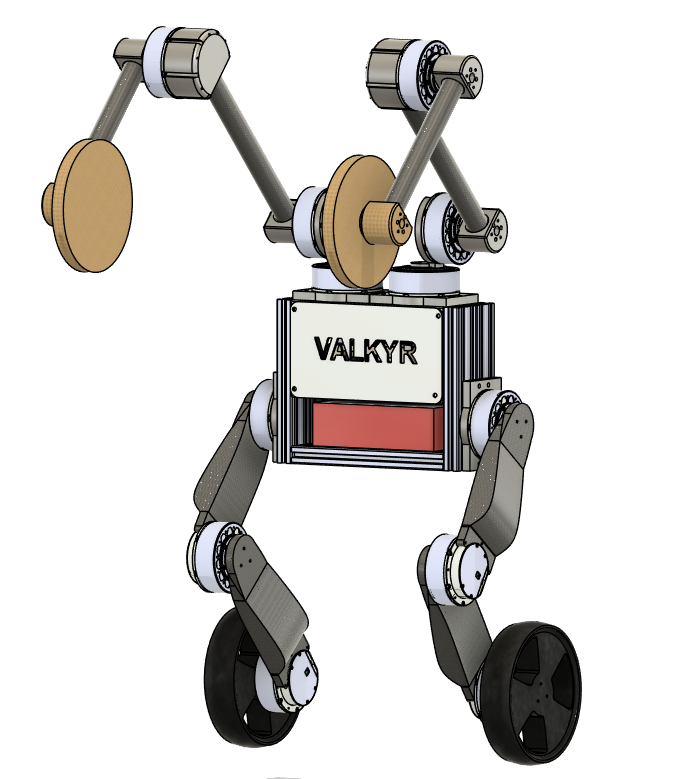
VALKYR is a wheeled locomanipulator I am developing to both traverse uneven terrain and manipulate objects in real-world environments. The system combines terrain-adaptive wheeled locomotion with dual-arm manipulation, serving as a proof of concept for hybrid robotic mobility and interaction.
The goal is to develop a platform that can move efficiently on wheels yet retain the dexterity and stability of legged systems. I am currently refining the mechanical design, simulation, and control architecture to achieve robust locomotion and coordinated manipulation.
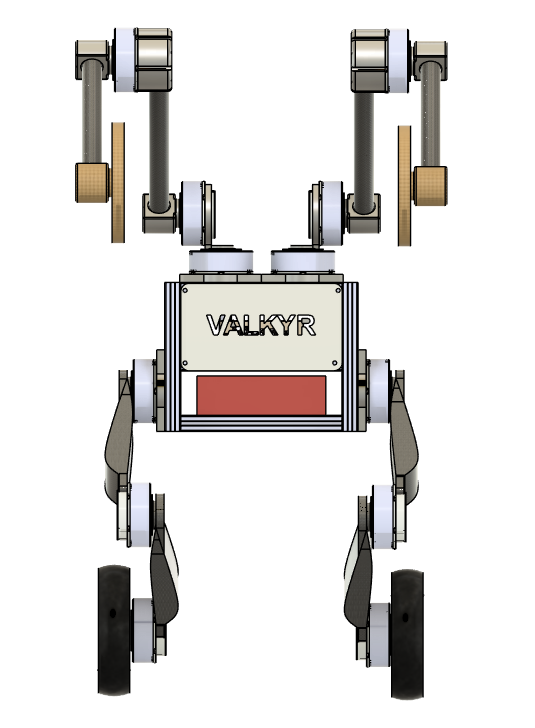
Front View
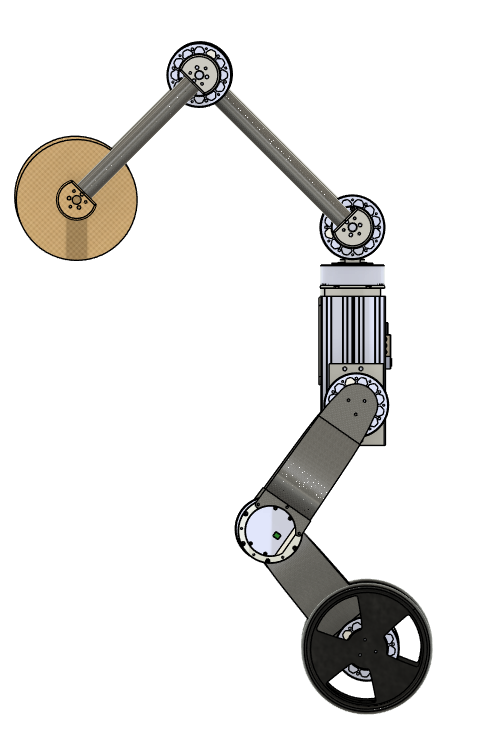
Side View
This version is an early prototype and an ongoing experiment in merging motion and intent. If the results meet expectations, I plan to continue evolving the design and updating the repository with new hardware iterations, control strategies, and test results.