
EMG Controlled Prosthetic Arm
Date:
Overview
This project was completed as part of my guided reading on Robots for Disability and demonstrates an approach to controlling a robotic hand using MyoWare EMG sensors. By detecting muscle activity, the system interprets the intensity of muscle flexing and translates it into real-time movements of a robotic hand. I might be late to the party, with startups like Psyonic, Esko Bionics, and Esper Bionics already leading the way in this field, but working on this project was an invaluable learning experience!
Key Features
Muscle-Controlled Movements: The robotic hand responds to muscle activity levels detected by the EMG sensor. Users can control the hand’s fingers by flexing their muscles.
Dynamic Thresholding: The system adapts to different users by calibrating baseline muscle activity during a relaxation phase. Thresholds are dynamically adjusted based on the user’s unique muscle signals.
Three States of Control: Relaxation: All fingers return to their neutral position. Mild Flex: Some fingers partially close. Full Flex: All fingers fully close.
Signal Smoothing: A low-pass filter is implemented to reduce noise in the EMG signal, ensuring accurate and stable servo movements.
Real-Time Responsiveness: The system processes EMG signals continuously, enabling smooth and responsive finger movements.
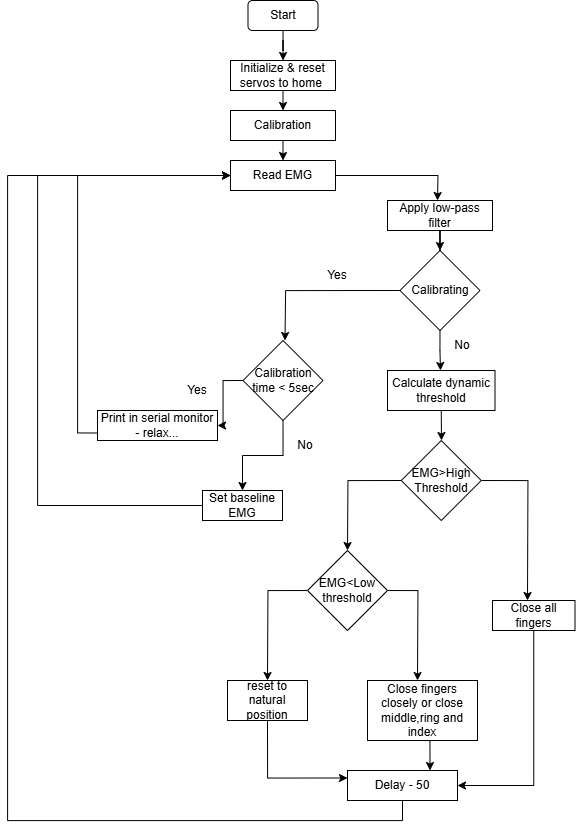
How It Works
Calibration Phase: At startup, the system enters a 5-second calibration phase where the user is instructed to relax their muscles. During this phase, the baseline EMG value (representing relaxed muscle activity) is calculated.
Signal Processing: The EMG sensor reads electrical signals from the user’s muscles. A low-pass filter smooths the signal to remove noise and fluctuations.
Threshold-Based Decision Making: The smoothed EMG signal is compared against two dynamic thresholds: Low Threshold: Detects mild flexing. High Threshold: Detects strong flexing. Based on these comparisons, the system determines whether to relax, partially flex, or fully flex the fingers.
Servo Control: Servo motors control each finger’s movement based on the detected state: Relaxation → Fingers return to neutral positions. Mild Flex → Some fingers partially close. Full Flex → All fingers fully close.
Technical Details
Hardware Components MyoWare EMG Sensor: Measures electrical activity from muscles and outputs an analog signal proportional to muscle contractions. Servo Motors: Control the movement of each robotic finger (pinky, ring, middle, index, thumb) by responding to processed EMG signals. Arduino Microcontroller: Processes the EMG signals, applies filtering and thresholding, and sends commands to the servo motors for precise control.
Software Features Low-Pass Filter: Smooths noisy EMG signals for better accuracy and stability during servo control. Dynamic Thresholding: Adapts thresholds based on user-specific baseline muscle activity, enabling personalized control of the robotic hand. Servo Library: Provides functions for controlling servo motors with precision and ease using Arduino. Programming Language: The system is programmed in C++ using the Arduino IDE for real-time signal processing and motor control.
Issues
Machine Learning Model Challenges: Overfitting: The ML model was trained on a limited dataset, which caused it to memorize the training data rather than generalizing to new inputs. This led to poor performance on unseen data.
Class Imbalance: The dataset had an uneven distribution of classes, causing the model to predict only one dominant outcome consistently.
Power Supply Constraints: Using different types of servos (with varying power requirements) resulted in a high power demand, which sometimes exceeded the available input capacity. This caused inconsistent servo performance and potential overheating issues.
So, I took a simpler approach by using dynamic thresholding and servo control logic instead of relying on ML models. This approach worked perfectly for what I wanted to achieve—real-time control of a robotic hand based on muscle activity
More information can be found by visiting my repo