
SonarDuino
Date:
“SonarDuino” is an innovative project that delves into the realm of robotics, specifically focusing on creating a 360-degree radar system for object detection. The project aims to enhance the capabilities of locomotion robots by providing them with the ability to detect the boundaries of their surroundings. This project demonstrates the use of an ultrasonic sensor as a SOund NAvigation and Ranging equipment with the use of an Arduino Mega for processing and collecting data. Visualization of objects detected by the system is presented through a GUI (replicating a SONAR scanning system).
SONAR, which stands for Sound Navigation and Ranging, is a technology that uses sound waves to navigate, communicate, and detect objects underwater. It plays a crucial role in various applications, including military, commercial shipping, fisheries, and oceanography. In robotics, SONAR (Sound Navigation and Ranging) is a valuable technology used for object detection, mapping, and navigation. Similar to its application in marine environments, SONAR in robotics employs sound waves to sense the surrounding environment
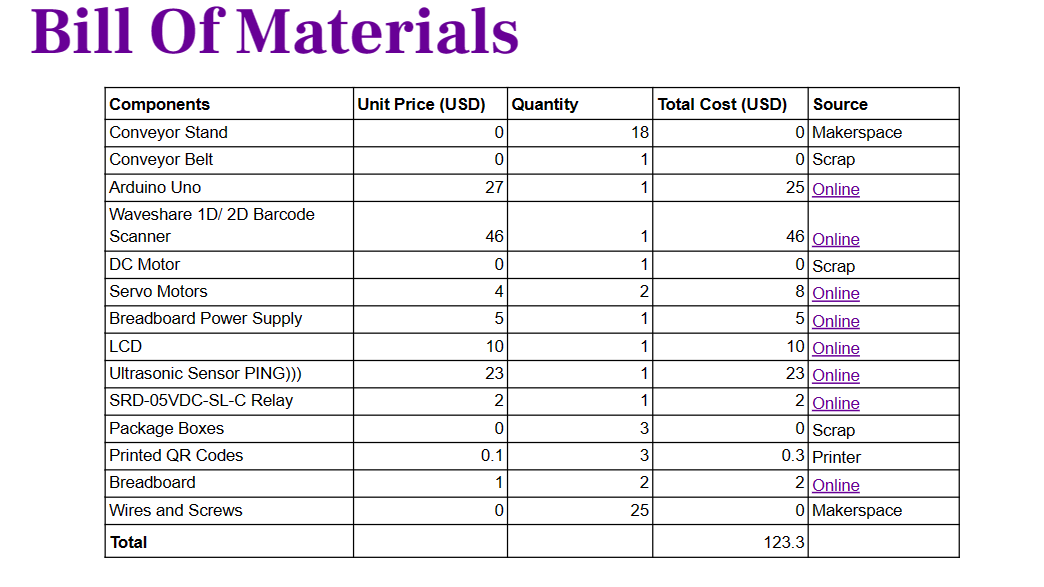
Bill Of Materials: —
System design: — 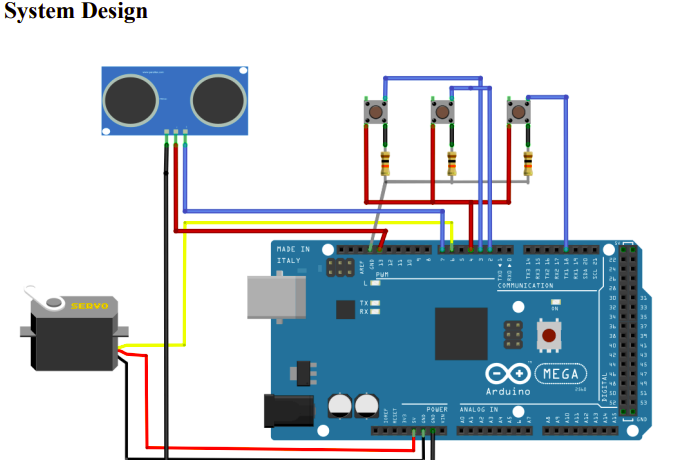
Operation: —
- Switching On: The Arduino Mega is connected to a laptop which serves as a power source. The connection is with a USB cable capable of transmitting power and data (This needs to be performed only once).
- Uploading code to Arduino: Ensure the USB cable is connected and then open the Arduino IDE. Select the correct port and then connect and upload the code to the Arduino Mega. The Arduino can then be disconnected and instead be connected to another power supply appropriate for the system to run the 9V servo motor and the Arduino.
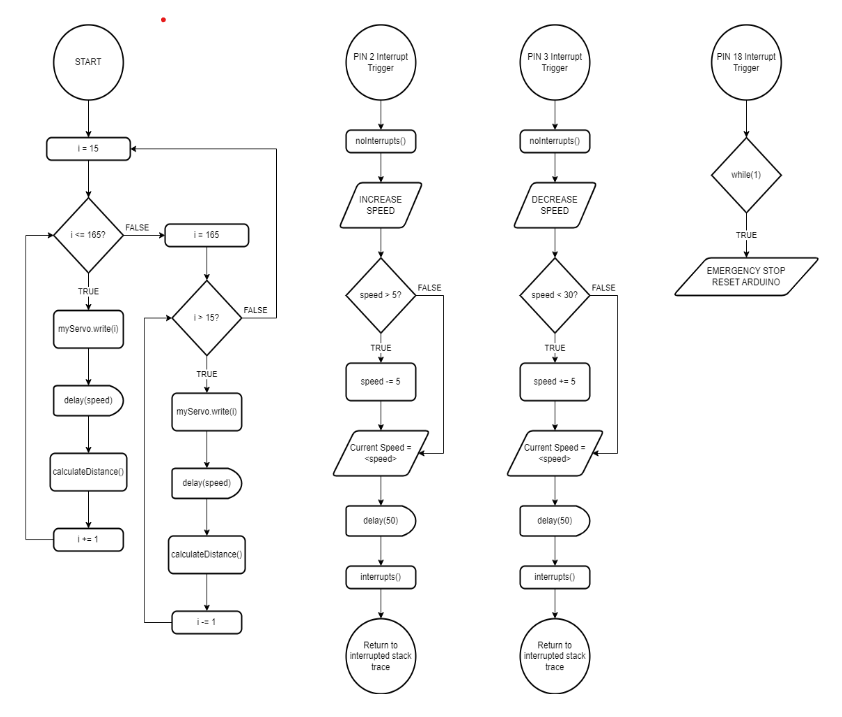
- Changing Scanning Speed: The program immediately starts rotating the servo motor to scan its surroundings with the ultrasonic sensor. To change the speed of the servo motor, one of the two buttons is used to increase the speed while the other is used to decrease it. The maximum speed it can reach is within a safe range of operation.
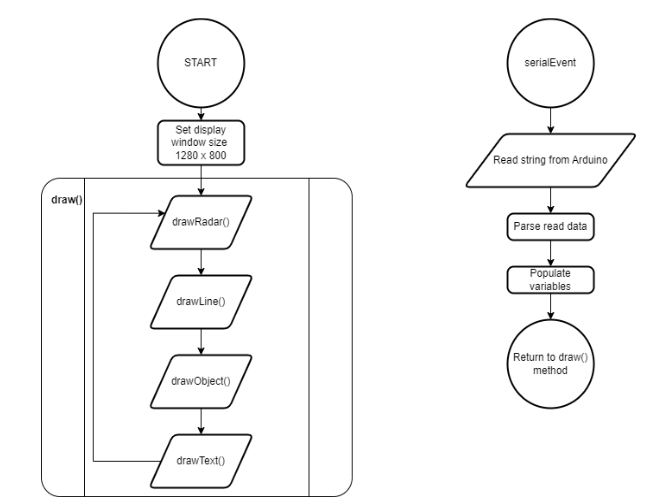
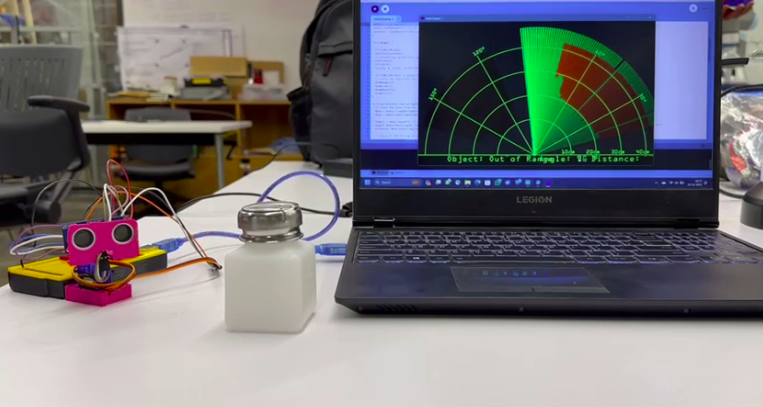
- Graphical Representation: Program for visualization has been coded in Java and linked with Arduino IDE using Processing IDE. Green lines indicate absence of an obstacle while red lines indicate that an obstacle is detected. An obstacle is detected within 40 cm from the ultrasonic sensor.
- Emergency Stop: This functionality is provided by a push button that stops rotation of the servo motor. The need to use this switch can occur when the ultrasonic sensor is to be tangled, damaged, or if the program is to be stopped.
Result: —
More information and the source code can be found in this repo.